- Шаг 1: Добавьте официальный репо Noetic в Ubuntu
- Шаг 2: Добавьте официальный брелок ROS keyring
- Шаг 3: Обновите индекс пакета ROS
- Шаг 4: Установка ROS Noetic на Ubuntu 20.04
- Установка ros-noetic-desktop-full
- Установка ros-noetic-desktop
- Установка ros-noetic-base
- Установка ros-noetic-core
- Шаг 5: Настройка среды ROS
- Проверка установки Noetic
- Заключение
ROS (Robot Operating System) – это проект с открытым исходным кодом, который предоставляет фреймворк и инструменты для робототехнических приложений. Это помогает проектировать сложное программное обеспечение, не зная, как работает определенное оборудование.
Noetic – это LTS-релиз ROS, специально разработанный для Ubuntu 20.04. Теоретическая поддержка ROS рассчитана до 2025 года (5 лет). Поддерживаемые архитектура -amd64, armhf и arm64.
В этой статье подробно рассмотрим, как установить ROS Noetic на Ubuntu 20.04.
Шаг 1: Добавьте официальный репо Noetic в Ubuntu
Первым шагом в установке ROS Noetic является добавление официального репозитория ROS Noetic в файл списка источников Ubuntu 20.04.
Чтобы добавить Noetic repo, введите:
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.list
Ответ:
deb http://packages.ros.org/ros/ubuntu focal main.
Шаг 2: Добавьте официальный брелок ROS keyring
Затем добавьте официальный брелок ROS в вашу систему Ubuntu 20.04. Для этого есть два пути.
Первый метод заключается в использовании hkp://keyserver.ubuntu.com:80 Ubuntu key server. Если это не сработает, вы можете попробовать заменить его на hkp://pgp.mit.edu:80.
Итак, выполните приведенную ниже команду.
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

Второй способ-использовать команду curl для загрузки официального брелока ROS и добавления его локально.
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
Вывод “ОК” означает, что ключ успешно добавлен.
Шаг 3: Обновите индекс пакета ROS
Затем мы обновим нашу систему Ubuntu таким образом, чтобы получить информацию о пакете ROS Noetic из репозитория.
$ sudo apt update
Это позволит синхронизировать недавно добавленный репозиторий с онлайновыми репозиториями Ubuntu.
Шаг 4: Установка ROS Noetic на Ubuntu 20.04
ROS имеет несколько метапакетов, которые вы можете установить в соответствии с вашими потребностями.
Ниже приведены официальные ROS метапакеты:
- ros-noetic-desktop-full
- ros-noetic-desktop
- ros-noetic-ros-base
- Ros-noetic-ros-core
Выберите нужный метапакет и установите его с помощью приведенных ниже команд. Например мы установим ros-noetic-desktop-full
Установка ros-noetic-desktop-full
Пакет ros-noetic-desktop-full поставляется со всеми пакетами в ros-noetic-desktop, а также пакетами (ros-noetic-perception) и моделирования (ros-noetic-simulators).
Чтобы установить ros-noetic-desktop-full, выполните следующую команду:
$ sudo apt install ros-noetic-desktop-full
После выполнения команды нажмите клавишу Y, чтобы продолжить установку.
Установка ros-noetic-desktop
Ros-noetic-desktop – это минимальная версия ros-noetic-desktop-full. Он содержит большинство учебных пакетов, включая:
- vis
- angles
- common_tutorials
- geometry_tutorials
- ros_tutorials
- roslint
- urdf_tutorial
- visualization_tutorials
Чтобы установить ros-noetic-desktop, выполните следующую команду:
$ sudo apt install ros-noetic-desktop
Установка ros-noetic-base
Ros-noetic-base содержит только базовые пакеты. Он включает в себя пакеты в ros_core и другие базовые инструменты, не связанные с роботом, такие как dynamic reconfigure, nodelets и actionlib.
Чтобы установить ros-noetic-base, выполните следующую команду:
$ sudo apt install ros-noetic-base
Установка ros-noetic-core
Ros-noetic-core содержит комплект пакетов. Которые включают в себя:
- common_msgs
- gencpp
- geneus
- genlisp
- genmsg
- gennodejs
- genpy
- message_generation
- message_runtime
- pluginlib
- ros
- ros_comm
- rosbag_migration_rule
- rosconsole
Чтобы установить ros-noetic-core, выполните следующую команду:
$ sudo apt install ros-noetic-core
Шаг 5: Настройка среды ROS
Следующим шагом является настройка среды ROS. Сначала запустите сценарий setup.bash в терминале.
$ source /opt/ros/noetic/setup.bash
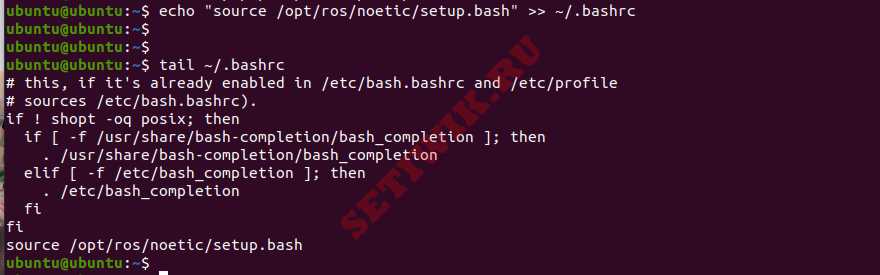
Добавьте файл .bashrc, который расположен в вашем домашнем каталоге, чтобы избежать запуска каждый раз:
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
Проверьте, выполнив следующую команду:
$ tail ~/.bashrc
Чтобы изменения вступили в силу, введите:
$ source ~/.bashrc
Проверка установки Noetic
После успешной установки ROS Noetic на Ubuntu 20.04 просто запустите команду roscd.
$ roscd
Вы заметите , что текущий каталог вашего запроса изменяется на /opt/ros/noetic, в котором мы установили Noetic.

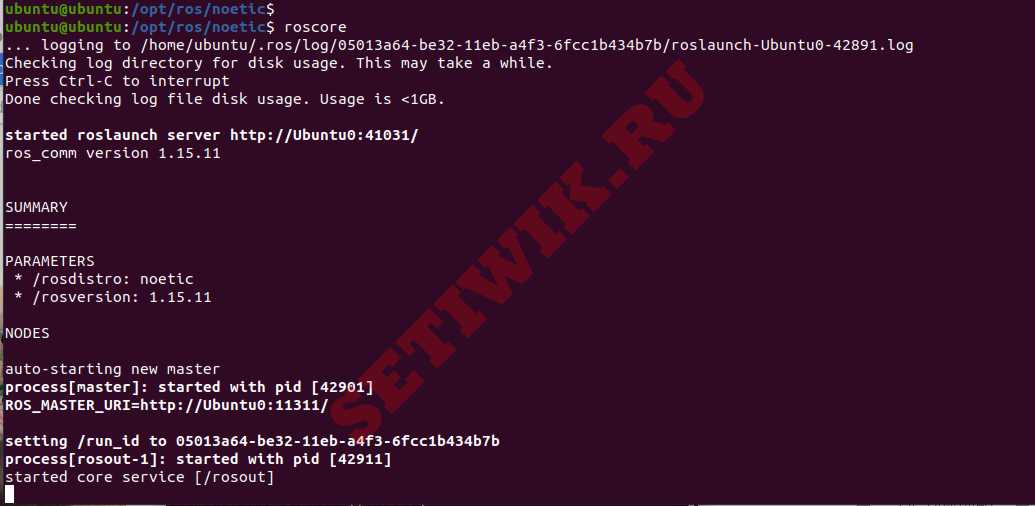
Также можно проверить установку, выполнив команду roscore в каталоге noetic. Выходные данные отображают дистрибутив ros и версию ros в сводке.
$ roscore
Заключение
Из этой статьи вы узнали, как установить ROS Noetic на Ubuntu 20.04. Теперь вы можете программировать своих роботов с помощью Noetic.
Понравилась статья?
Помогите Setiwik.ru создавать больше глубоких обзоров и новостей. Один клик и ваш вклад помогает держать серверы включёнными и авторов мотивированными!
Поддержать проектСпасибо, что вы с нами!